







Industrie:
VOEDSEL
Waarom zijn asperges een van de duurste groentes in Europa? Omdat de stengels een voor een met de hand moeten worden geoogst. Met een robot zou dit anders kunnen, en ingenieurs bij het Bremer Centrum voor Mechatronica (BCM) zijn daarom bezig er een te ontwikkelen. Het werkt met een oogstsysteem op precisiegeleidingen van HepcoMotion – een specialist op het gebied van lineaire geleidingssystemen.
Omdat de populariteit van asperges de afgelopen jaren gestaag is toegenomen, brengt dit voor kwekers elk voorjaar veel stress met zich mee. Er moeten in zeer korte tijd immers enorme hoeveelheden worden geoogst – volgens het Federal Bureau for Statistics in 2015 112.100 ton. Het werk op de velden is zwaar en de plukkers moeten de stengels stuk voor stuk doorsnijden. Het is dus niet verwonderlijk dat kwekers het steeds moeilijker vinden om plukkers te vinden en dat ze asperges vanwege de arbeidskosten alleen tegen hoge prijzen kunnen aanbieden.

The robot uses a camera system to identify which asparagus stems are ready for harvesting
Automatisering is dus zeer wenselijk en de sector is daar al geruime tijd mee bezig. Ondanks verschillende benaderingen heeft men tot nog toe geen machine kunnen ontwikkelen die beter presteert dan menselijke plukkers. Garotics, een project voor het oogsten van groene asperges, is hard op weg hierin verandering te brengen. Het Bremer Centrum voor Mechatronica (BCM), het in Buxtehude gevestigde bedrijf Strauss – fabrikant van verpakkingsmachines – en het Engelse landbouwkundig bedrijf C. Wright & Son werken samen aan dit project.
De robot gebruikt een camerasysteem om vast te stellen welke aspergestengels klaar zijn om geoogst te worden
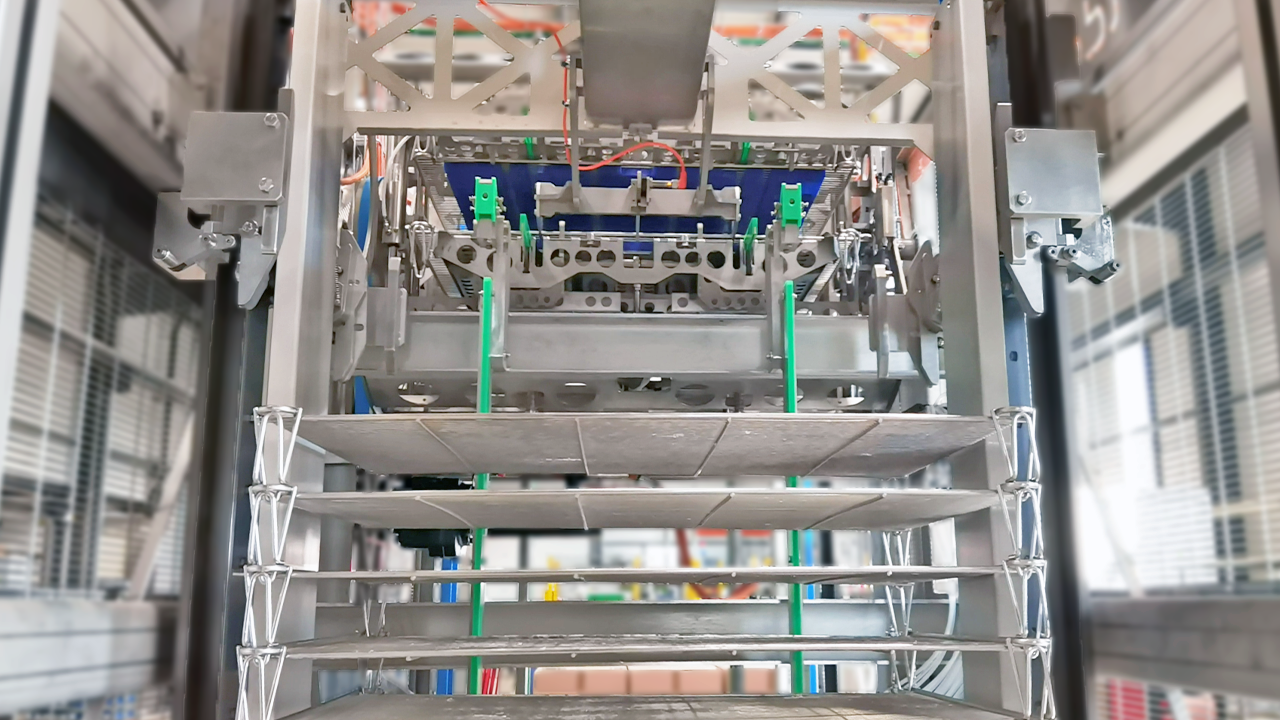
De basis van de oogstrobot is een chassis met vier wielen en een voorwielaandrijving. In het midden tussen de voorwielen bevindt zich een camerasysteem dat de groene asperges in het voorbij gaan filmt. In tegenstelling tot witte asperges steken groene asperges boven de grond uit. Fotografische verwerkingsprogrammatuur bepaalt vervolgens de stengels die klaar zijn om te oogsten.

“Het zou niet zinvol zijn een soort grasmaaier te bouwen dat alles in één keer meeneemt, want de ene plant groeit nu eenmaal sneller dan de andere. Een van de uitdagingen was dus een beeldverwerkingsysteem te implementeren dat de verschillende groeistadia kon onderscheiden.”
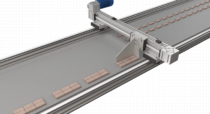
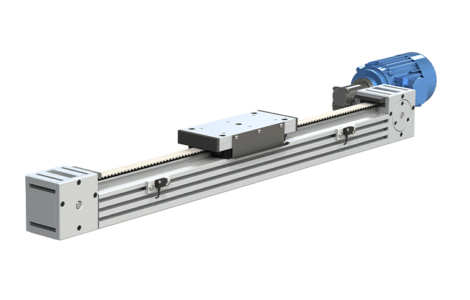
Lineaire geleidingen van HepcoMotion maken precieze positionering van het oogstsysteem mogelijk
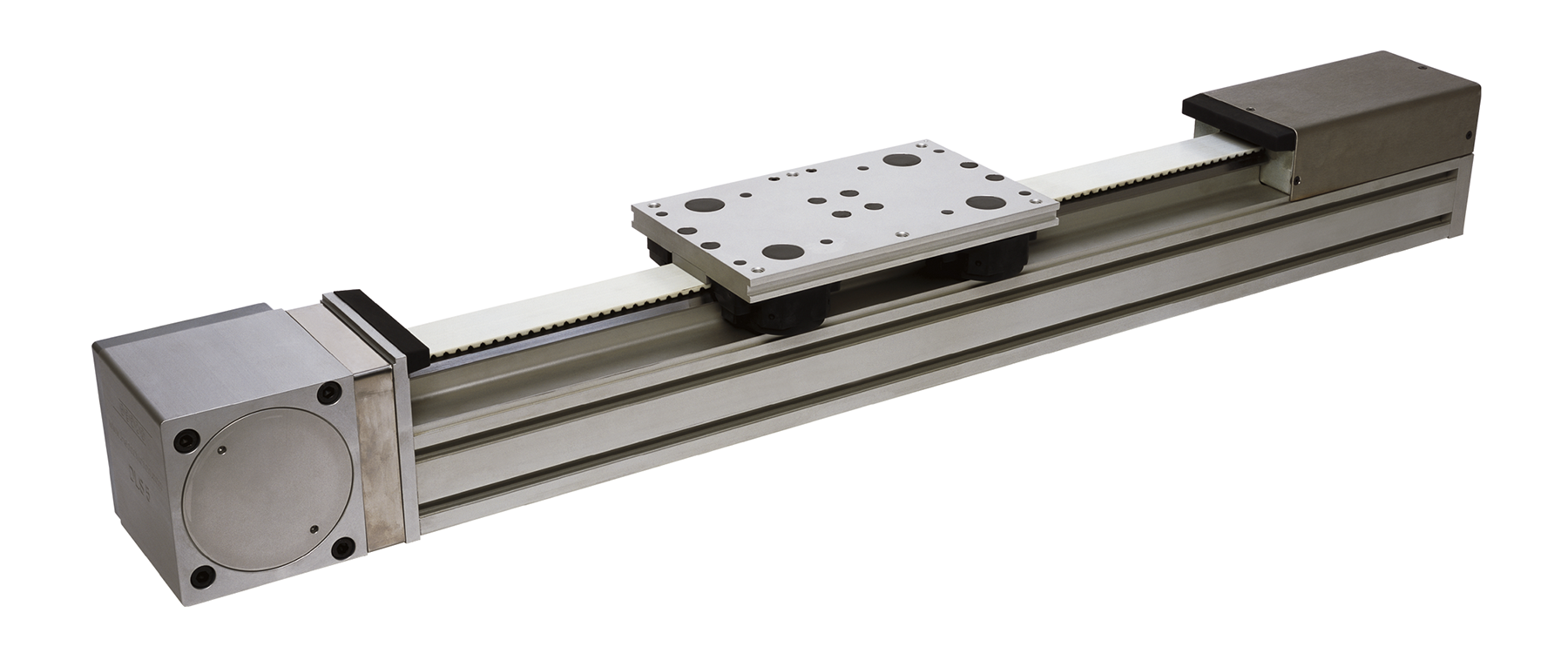
De programmatuur brengt de coördinaten van de rijpe stengels over naar het snijkopsysteem, dat onder een geharde en met uiterste precisie vervaardigde roestvrijstalen lineaire geleiding van HepcoMotion is gemonteerd. Het snijkopsysteem kan zich zijdelings over de hele breedte van het voertuig verplaatsen op een door een distributieriem aangedreven wagen.
De aandrijving wordt verzorgd door een AC-motor/vertragingskast met een wormmechanisme, dat zich naast de lineaire geleiding bevindt. “De motoren van het DLS-systeem kunnen een vermogen tot 1,1 kW hebben bij een tandwielreductie van 5:1 tot 75:1”, zegt Mark Völkers, regiomanager field sales voor Noord Duitsland bij HepcoMotion. “Hiermee kunnen aandrijfkrachten tot 750 Newton en snelheden tot 1,4 meter per seconde worden ontwikkeld. Met speciale motoren kan zelfs een snelheid van 5 meter per seconde worden bereikt”. De oogstrobot werkt met twee snijknopsystemen tegelijk. Deze kunnen zich onafhankelijk van elkaar verplaatsen op twee achter elkaar gepositioneerde rails, waardoor een hoge doorvoersnelheid kan worden bereikt.
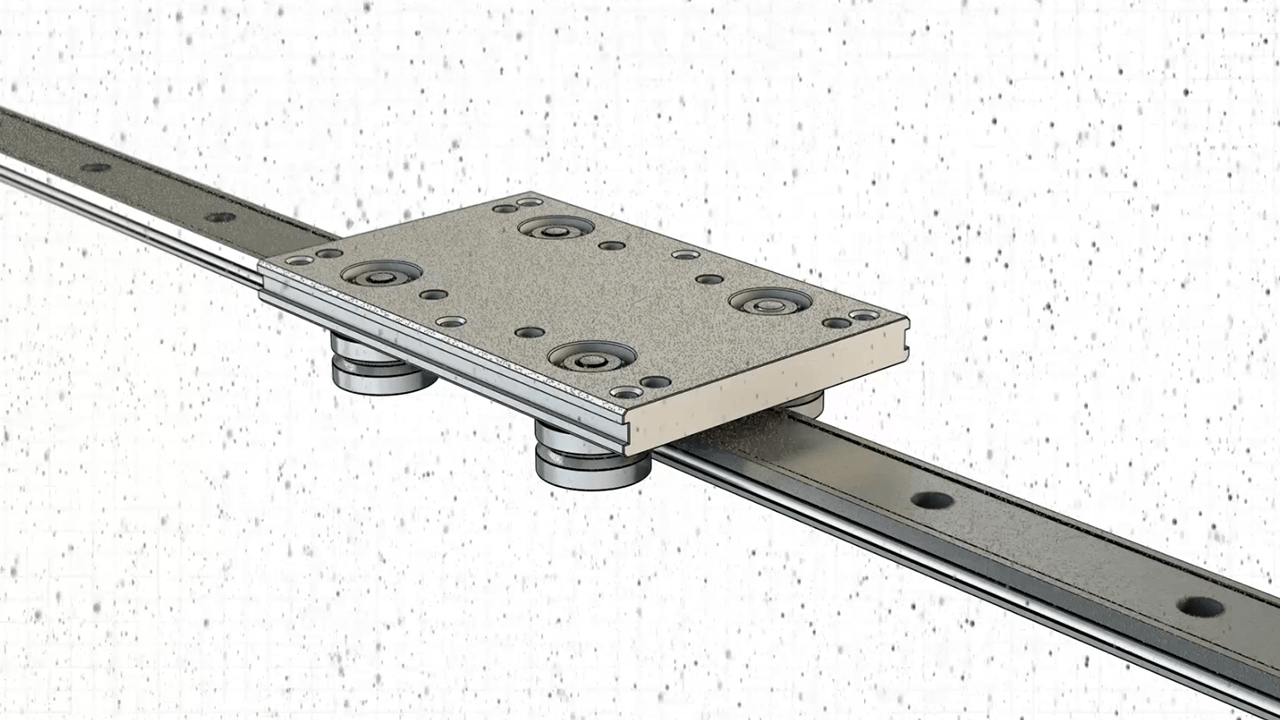
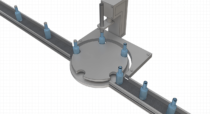
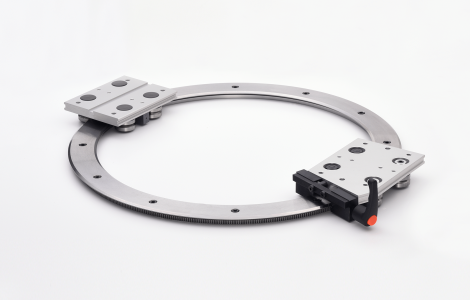
Ringsegmenten van HepcoMotion maken een zwenkbeweging met slechts één aandrijving mogelijk
Zodra het snijkopsysteem is gepositioneerd, verplaatst het met een zwenkbeweging een grijparm van achteren naar beneden. Voor deze beweging hebben de technici een ander systeem van HepcoMotion toegepast: de PRT2. De oplossing is gebaseerd op een spectrum van roestvast stalen ringen en ringsegmenten. Met rechte geleidingen kunnen deze worden gekoppeld aan verschillende open en gesloten geleiderdelen. Bij de aspergerobot zijn er bochten van 90 graden aan beide zijden van het snijkopsysteem, waaraan rechte stukken zijn bevestigd.

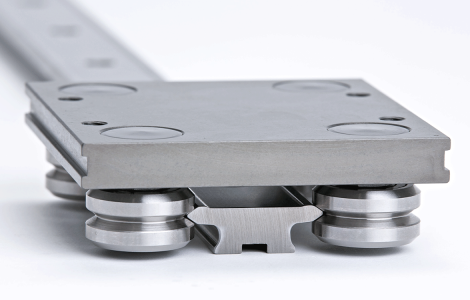
De grijparm is met schroeven bevestigd aan een wagen met concentrisch en excentrisch opgestelde V-geleiderlagers. Deze rollen grijpen van boven en onderen aan met de inductie-geharde V-baan van het ringsegment.
De beweging wordt gestuurd door een distributieriem die de wagen en de grijparm over de 25 millimeter brede geleider trekt, waardoor een scharnierende beweging ontstaat. De motor is aan de buitenkant van het snijkopsysteem gemonteerd. Een langzamere beweging zou eerder moeten beginnen, waardoor de grijparm onvolgroeide aspergestengels zou kunnen beschadigen die dus nog niet klaar zijn om te worden geoogst. Zodra de grijparm is gezakt, wordt een pneumatische cilinder geactiveerd om een actie te activeren waarbij de aspergestengel tegelijkertijd wordt vastgegrepen en doorgesneden, terwijl de robot continu voortbeweegt met een snelheid van 0,5 meter per seconde. Het gehele snijkopsysteem wordt dan naar de zijkant verplaatst, waar de aspergestengel op een transportband terechtkomt.
“Het bijzondere is dat dankzij het railsysteem een lineaire beweging en rotatie van de grijper worden bereikt met slechts een ruimtebesparende aandrijving. De rolgeleider laat de grijparm ook relatief snel zakken, en door de combinatie van een lineaire beweging en rotatie bij het zakken past het in de beperkte ruimte tussen de stengels van twee naast elkaar gelegen aspergeplanten.”
Omdat asperges in verschillende landen worden gekweekt, kunnen de omgevingscondities sterk verschillen. Het klimaat kan bijvoorbeeld heet of koud zijn, of de omgeving stoffig dan wel nat. Dit was een andere reden voor de ingenieurs om voor de omgevingsbestendige systemen van HepcoMotion te kiezen. “Het V-geleidingsprincipe is vrijwel zelfreinigend” zegt Völkers. Tijdens het transport van de wagen drukken de lagers het vuil van de rail.” Omdat alle componenten corrosiebestendig zijn, hoeft er in tegenstelling tot lagercirculatiesystemen bovendien geen smering plaats te vinden. De asperges komen dus nooit in aanraking met roest. “Dit is een van de basisvereisten waaraan in de voedingsindustrie moet worden voldaan.”
Praktijktests
De ingenieurs hebben de apsergeoogstrobot onder echte praktijkomstandigheden getest bij hun projectpartner in Engeland, C. Wright & Son. “Een van de zaken die we wilde testen in deze praktijktest was hoe lang de accu’s de machine van energie zouden kunnen voorzien”, vertelt Strauss. Een van de uitdagingen is ook de snelheid van de oogstsystemen. Tot nu toe zijn deze niet sneller gebleken dan menselijke plukkers, maar met een voldoende grote energievoorziening zouden ze zonder problemen 24 uur lang ononderbroken op de velden kunnen worden ingezet. Dit zou het oogsten in de toekomst economischer en asperges dus goedkoper kunnen maken.
Aanbevolen voor u

Neem contact met ons op
E-mail [email protected]
Adres
HepcoMotion Europe
Doornhoek 3850
5465 TB Veghel
Nederland
Contactformulier